Virtual robotics
Author: u | 2025-04-24

What is Virtual Robot? Definition of Virtual Robot: Virtual robotics is based on the use of virtual environments for robot programming. That is, it is not necessary to have the physical robot or the development kit to experiment. The programming of virtual robots is especially useful for educational work and for learning about robotics by the little ones. Virtual robotics. Modeling tool for virtual robotics body parts. Virtual robotics; Brainstorming ideas; Examples. March, 2025. virtual-robotics is maintained by boytchev. This page was generated by
Virtual Robotics Tutorial 1: Introducing the Virtual VEX Robot and
Robotics has witnessed a significant surge in interest, with numerous governments and enterprises making substantial investments. Robotics involves the application of robots in a wide range of sectors and services. Particularly, industrial robotics is experiencing a surge in popularity, driven by the advancements in AI and AutoML. #6 Augmented Reality & Virtual Reality Forecasted Valuation in 2030: $ 454.73 Billion Virtual reality is predominantly found in the form of VR headsets such as the Oculus Quest and PlayStation VR. It typically provides a 360-degree visual virtual environment, offering a range of simulations that vary from minimally immersive to fully immersive experiences. The possibilities of entering a virtual realm, akin to the holodeck depicted in Star Trek, are truly astounding. They extend from present-day medical training to potential applications in mental healthcare, from long-distance tourism to virtual real estate tours. Moreover, for those inclined, Ready Player One-style worlds are readily accessible. On the other hand, augmented reality involves overlaying digital information onto your real-time, real-world surroundings. A prime example of AR’s popularity is the phenomenon of Pokemon Go, which saw people gathering in parks to capture digital creatures on their smartphones. In the retail industry, you can use your phone to observe a dynamic arrow on the ground in a store, guiding you to the correct aisle. When it comes to inventory management, you can instantly identify the specific box’s location in the warehouse. Essentially, nearly every sci-fi vision involving high-tech eyewear is progressively becoming more plausible with each passing day.
VEXcode Virtual Robots (VR) - VEX Robotics
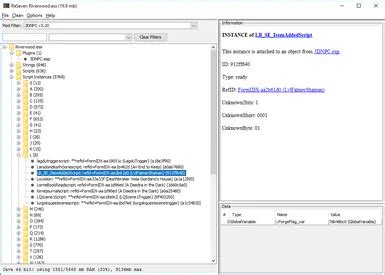
Environment and "real world" electronic devices and tools to greatly enhance the user's comprehension of electronics. RoboLogix Robotics Simulation SoftwareRoboLogix is a state-of-the-art robotics simulation software package that is designed to emulate real-world robotics applications. With RoboLogix, you teach, test, run, and de-bug programs that you have written yourself using a five-axis industrial robot in a wide range of practical applications. These applications include pick-and-place, palletizing, welding, painting and allow for customized environments so that you can design your own robotics application. With RoboLogix, the user can run the simulator to test and visually examine the execution of robot programs and control algorithms, while plotting instantaneous joint accelerations, velocities and positions.RoboLogix is ideal for students as well as robot designers and engineers. The simulation software allows for verification of the reach- ability, travel ranges and collisions. This allows for increased reliability of the planning process and program development as well as reducing the overall completion/commissioning time. RoboLogix enables programmers to write their own robot programs, modify the environment and use the available sensors. These sensors include video cameras which are used for obtaining the desired position of the robot end effector. In addition, a teach pendant is included with the simulator that allows the user to command the robot to pick up a tracked object and return it to a home location through jogged commands or pre-programmed positions.The ability to preview the behavior of a robotic system in a "virtual" world allows for a variety of mechanisms, devices, configurations and controllers to be tried and tested before being applied to a "real world" system. RoboLogix receives control signals, determines if contact or collision between objects in the system has occurred, and returns simulated sensor information as feedback. This system has the capacity of real-time simulation of the motion of an industrial robot through 3D animation. The principles of 3D motion simulation and both geometry modeling and kinematics modeling are presented in the RoboLogix virtual environment. Electronics CBT with CircuitLogix ProThe Electronics CBT software provides flexible, skills-based education in basic electronics. The learning package provides an overview of Current, Voltage, Resistance,Virtual Robotics Curriculum - a Complete Solution for Robotics
By . Last updated on Dec 12, 2024 Posted on Jul 18, 2014 in Robot Programming 4 min read time A lot of technologies have been developed over the years to robotize manufacturing processes. Today, there are many manufacturers and even more products to fulfill any need in robotics. Different integrations between products can be made in order to create the perfect robotic device for any intended application. For example, you could use a robot arm with an end effector installed on a mobile platform and make it move around the shop. But, since there are many different products on the market, it might be quite puzzling to find the right fit. Coppelia Robotics offers a great solution to simulate your robotic cell : V-REP, virtual robot experimentation platform.This software has many features to help you experiment with your installation before buying your robotic devices. FeaturesCoppelia Robotics presents V-REP as the "Swiss army knife" among robotic simulators since it has more functions, features and more elaborate APIs than any other software. Here is an overview of its features.Cross platform (Windows, MacOSX, Linux)6 programming approaches (embedded scripts, plugins, add-ons, ROS nodes, remote API clients, or custom solutions)6 programming languages (C/C++, Python, Java, Lua, Matlab, and Urbi)More than 400 different API functionsROS Interface (100 ROS services, 30 ROS publisher types, 25 ROS subscriber types, extendable capabilities)2 physics engines (ODE and Bullet)Full kinematics solver (IK and FK for ANY mechanisms)Mesh-mesh interference detectionMesh-mesh minimum distance calculationPath planning (holonomic in 2-6 dimensions, non-holonomic for car-like. What is Virtual Robot? Definition of Virtual Robot: Virtual robotics is based on the use of virtual environments for robot programming. That is, it is not necessary to have the physical robot or the development kit to experiment. The programming of virtual robots is especially useful for educational work and for learning about robotics by the little ones. Virtual robotics. Modeling tool for virtual robotics body parts. Virtual robotics; Brainstorming ideas; Examples. March, 2025. virtual-robotics is maintained by boytchev. This page was generated byVirtual Robotics Toolkit - Nullspace Robotics (SG)
Turner Construction is a US-based international construction services company with over 10,000 employees. It is renowned worldwide for its innovative use of technology and completes approximately $12 billion of construction projects each year.One of the biggest construction users of the DroneDeploy platform, Turner recently decided to add ground robotics to its arsenal of tools for building large-scale data centers across the US.Turner now uses DroneDeploy’s Robotics solution to perform autonomous data capture and 360° virtual walkthroughs of its construction sites on a daily basis. By sending robots to perform inspections overnight, Turner is able to accurately, consistently and repeatedly capture progress on some of its biggest and most complex projects—which currently include the construction of large data halls.“DroneDeploy just works—it does exactly what we needed and expected the solution to do.” Chris McKee, Reality Capture Manager, Turner ConstructionWhy Turner Choose DroneDeploy’s Robotics SolutionTurner had previously purchased Spot and wanted to enhance the autonomous navigation and teleoperation capabilities of the robot. Chris McKee, Reality Capture Manager at Turner, turned to DroneDeploy’s specialists for help.McKee had three goals: navigate large data center construction sites autonomouslycapture daily images of progressimprove efficiency by integrating with Turner’s existing site documentation tools like StructionSite and DroneDeployWith DroneDeploy’s Robotics solution, McKee was able to achieve all of these goals. Turner now uses Spot with an Insta360 camera on job sites with great success.Conducting 360° Virtual Walkthroughs OvernightBecause the DroneDeploy platform enables Turner to map routes for Spot to follow autonomously, the mobile robot is able to capture data overnight after all the workers have gone home.These missions can be remotely scheduled from anywhere and set to repeat at the same time each day. Equipped with the Insta360 camera, Spot captures a detailed visual timeline of progress on the job site and uploads this data to the cloud. This saves hours of valuable time for Turner’s contractors as they don’t have to walk through sites manually taking photographs of progress.This data is processed in StructionSite as a VideoWalk. The 360° images from the walk are mapped to the digital floor plan, making them easy to view, annotate andHow to Program a Robot in the Virtual Robotics Toolkit
Accessing devices plugged to Serial device server Serial Port Redirector can be used to access remote serial devices connected to serial device servers. In this example, Modem US Robotics is physically attached to the COM port on the remote Serial Device Server. You need to get access to the modem from your local computer over local network or the Internet. To get access to the remote modem, Serial Port Redirector creates virtual COM port on the local computer (e.g. COM3). When virtual serial port is created it is required to specify the IP-address of the Serial Device Server and TCP port of a particular COM port. An individual TCP port is assigned to a separate physical COM port on a Serial Device Server. In the example the US Robotics modem is plugged into the COM port with TCP port 5001 on the Serial Device Server. Now, modem software on the local computer opens virtual COM3 port. As result the connection with the remote modem is established and data exchange can be performed. The modem software interacts with the modem as if it were plugged into a local COM port, but in fact the modem is attached to the remote Serial Device Server. Usually, RFC2217 protocol (Telnet Com Port Control Option) is used to access serial devices attached to serial device server.Connecting Serial Communications Application with TCP/IP Enabled Application Serial Port Redirector can be used to connect usual serial communications software with TCP/IP software. In this example, the TCP/IP application is running on the remote computer and listens on the specified TCP port for incoming connections. The serial communications application is running on the local computer and uses virtual serial port COM3 created by Serial Port Redirector. This virtual serial port is configured to use the remote IP address and TCPVirtual Robotics Simulator? : r/robotics - Reddit
Oct 14, 2024 Learning Fluid Flow with AI-Enabled Virtual Wind Tunnels There’s never enough time to do everything, even in engineering education. Employers want engineers capable of wielding simulation tools to expedite iterative... 9 MIN READ Learning Fluid Flow with AI-Enabled Virtual Wind Tunnels Jul 30, 2024 Just Released: NVIDIA Modulus v24.07 NVIDIA Modulus 24.07 brings new GNN enhancements and application samples for training with large meshes. 1 MIN READ Just Released: NVIDIA Modulus v24.07 Jul 30, 2024 Empowering Energy Trading with MetDesk and NVIDIA Earth-2 Despite the continuous improvement of weather forecasts over the last few decades, uncertainties due to meteorological measurements and models mean that... 13 MIN READ Empowering Energy Trading with MetDesk and NVIDIA Earth-2 Apr 22, 2024 Just Released: NVIDIA Modulus v24.04 Modulus v24.04 delivers an optimized CorrDiff model and Earth2Studio for exploring weather AI models. 1 MIN READ Just Released: NVIDIA Modulus v24.04 Jan 31, 2024 Just Released: NVIDIA Modulus 24.01 NVIDIA Modulus 24.01 updates distributed utilities and samples for physics informing DeepONet and GNNs. 1 MIN READ Just Released: NVIDIA Modulus 24.01 Nov 21, 2023 Just Released: NVIDIA Modulus 23.11 Now available, NVIDIA Modulus 23.11 introduces a diffusion modeling framework and novel architectures. 1 MIN READ Just Released: NVIDIA Modulus 23.11 Sep 21, 2023 Just Released: NVIDIA Modulus 23.09 NVIDIA Modulus 23.09 is now available, providing ease-of-use updates, fixes, and other enhancements. 1 MIN READ Just Released: NVIDIA Modulus 23.09 Aug 09, 2023 Just Released: NVIDIA Modulus 23.08 NVIDIA Modulus is now part of the NVIDIA AI Enterprise suite, supporting PyTorch 2.0, CUDA 12, and new samples. 1 MIN READ Just Released: NVIDIA Modulus 23.08 Jul 07, 2023 Explainer: What Is Robotics Simulation? Robotics simulation enables virtual training and programming that can use physics-based digital representations of environments, robots, machines, objects, and... 1 MIN. What is Virtual Robot? Definition of Virtual Robot: Virtual robotics is based on the use of virtual environments for robot programming. That is, it is not necessary to have the physical robot or the development kit to experiment. The programming of virtual robots is especially useful for educational work and for learning about robotics by the little ones. Virtual robotics. Modeling tool for virtual robotics body parts. Virtual robotics; Brainstorming ideas; Examples. March, 2025. virtual-robotics is maintained by boytchev. This page was generated byComments
Robotics has witnessed a significant surge in interest, with numerous governments and enterprises making substantial investments. Robotics involves the application of robots in a wide range of sectors and services. Particularly, industrial robotics is experiencing a surge in popularity, driven by the advancements in AI and AutoML. #6 Augmented Reality & Virtual Reality Forecasted Valuation in 2030: $ 454.73 Billion Virtual reality is predominantly found in the form of VR headsets such as the Oculus Quest and PlayStation VR. It typically provides a 360-degree visual virtual environment, offering a range of simulations that vary from minimally immersive to fully immersive experiences. The possibilities of entering a virtual realm, akin to the holodeck depicted in Star Trek, are truly astounding. They extend from present-day medical training to potential applications in mental healthcare, from long-distance tourism to virtual real estate tours. Moreover, for those inclined, Ready Player One-style worlds are readily accessible. On the other hand, augmented reality involves overlaying digital information onto your real-time, real-world surroundings. A prime example of AR’s popularity is the phenomenon of Pokemon Go, which saw people gathering in parks to capture digital creatures on their smartphones. In the retail industry, you can use your phone to observe a dynamic arrow on the ground in a store, guiding you to the correct aisle. When it comes to inventory management, you can instantly identify the specific box’s location in the warehouse. Essentially, nearly every sci-fi vision involving high-tech eyewear is progressively becoming more plausible with each passing day.
2025-04-09Environment and "real world" electronic devices and tools to greatly enhance the user's comprehension of electronics. RoboLogix Robotics Simulation SoftwareRoboLogix is a state-of-the-art robotics simulation software package that is designed to emulate real-world robotics applications. With RoboLogix, you teach, test, run, and de-bug programs that you have written yourself using a five-axis industrial robot in a wide range of practical applications. These applications include pick-and-place, palletizing, welding, painting and allow for customized environments so that you can design your own robotics application. With RoboLogix, the user can run the simulator to test and visually examine the execution of robot programs and control algorithms, while plotting instantaneous joint accelerations, velocities and positions.RoboLogix is ideal for students as well as robot designers and engineers. The simulation software allows for verification of the reach- ability, travel ranges and collisions. This allows for increased reliability of the planning process and program development as well as reducing the overall completion/commissioning time. RoboLogix enables programmers to write their own robot programs, modify the environment and use the available sensors. These sensors include video cameras which are used for obtaining the desired position of the robot end effector. In addition, a teach pendant is included with the simulator that allows the user to command the robot to pick up a tracked object and return it to a home location through jogged commands or pre-programmed positions.The ability to preview the behavior of a robotic system in a "virtual" world allows for a variety of mechanisms, devices, configurations and controllers to be tried and tested before being applied to a "real world" system. RoboLogix receives control signals, determines if contact or collision between objects in the system has occurred, and returns simulated sensor information as feedback. This system has the capacity of real-time simulation of the motion of an industrial robot through 3D animation. The principles of 3D motion simulation and both geometry modeling and kinematics modeling are presented in the RoboLogix virtual environment. Electronics CBT with CircuitLogix ProThe Electronics CBT software provides flexible, skills-based education in basic electronics. The learning package provides an overview of Current, Voltage, Resistance,
2025-04-18Turner Construction is a US-based international construction services company with over 10,000 employees. It is renowned worldwide for its innovative use of technology and completes approximately $12 billion of construction projects each year.One of the biggest construction users of the DroneDeploy platform, Turner recently decided to add ground robotics to its arsenal of tools for building large-scale data centers across the US.Turner now uses DroneDeploy’s Robotics solution to perform autonomous data capture and 360° virtual walkthroughs of its construction sites on a daily basis. By sending robots to perform inspections overnight, Turner is able to accurately, consistently and repeatedly capture progress on some of its biggest and most complex projects—which currently include the construction of large data halls.“DroneDeploy just works—it does exactly what we needed and expected the solution to do.” Chris McKee, Reality Capture Manager, Turner ConstructionWhy Turner Choose DroneDeploy’s Robotics SolutionTurner had previously purchased Spot and wanted to enhance the autonomous navigation and teleoperation capabilities of the robot. Chris McKee, Reality Capture Manager at Turner, turned to DroneDeploy’s specialists for help.McKee had three goals: navigate large data center construction sites autonomouslycapture daily images of progressimprove efficiency by integrating with Turner’s existing site documentation tools like StructionSite and DroneDeployWith DroneDeploy’s Robotics solution, McKee was able to achieve all of these goals. Turner now uses Spot with an Insta360 camera on job sites with great success.Conducting 360° Virtual Walkthroughs OvernightBecause the DroneDeploy platform enables Turner to map routes for Spot to follow autonomously, the mobile robot is able to capture data overnight after all the workers have gone home.These missions can be remotely scheduled from anywhere and set to repeat at the same time each day. Equipped with the Insta360 camera, Spot captures a detailed visual timeline of progress on the job site and uploads this data to the cloud. This saves hours of valuable time for Turner’s contractors as they don’t have to walk through sites manually taking photographs of progress.This data is processed in StructionSite as a VideoWalk. The 360° images from the walk are mapped to the digital floor plan, making them easy to view, annotate and
2025-04-06Accessing devices plugged to Serial device server Serial Port Redirector can be used to access remote serial devices connected to serial device servers. In this example, Modem US Robotics is physically attached to the COM port on the remote Serial Device Server. You need to get access to the modem from your local computer over local network or the Internet. To get access to the remote modem, Serial Port Redirector creates virtual COM port on the local computer (e.g. COM3). When virtual serial port is created it is required to specify the IP-address of the Serial Device Server and TCP port of a particular COM port. An individual TCP port is assigned to a separate physical COM port on a Serial Device Server. In the example the US Robotics modem is plugged into the COM port with TCP port 5001 on the Serial Device Server. Now, modem software on the local computer opens virtual COM3 port. As result the connection with the remote modem is established and data exchange can be performed. The modem software interacts with the modem as if it were plugged into a local COM port, but in fact the modem is attached to the remote Serial Device Server. Usually, RFC2217 protocol (Telnet Com Port Control Option) is used to access serial devices attached to serial device server.Connecting Serial Communications Application with TCP/IP Enabled Application Serial Port Redirector can be used to connect usual serial communications software with TCP/IP software. In this example, the TCP/IP application is running on the remote computer and listens on the specified TCP port for incoming connections. The serial communications application is running on the local computer and uses virtual serial port COM3 created by Serial Port Redirector. This virtual serial port is configured to use the remote IP address and TCP
2025-04-17Can get started today with ROS 2 Nodes for Generative AI, which brings NVIDIA Jetson-optimized LLMs and VLMs to enhance robot capabilities.Enhancing ROS Workflows With a ‘Sim-First’ ApproachSimulation is critical to safely test and validate AI-enabled robots before deployment. NVIDIA Isaac Sim, a robotics simulation platform built on OpenUSD, provides ROS developers a virtual environment to test robots by easily connecting them to their ROS packages. A new Beginner’s Guide to ROS 2 Workflows With Isaac Sim, which illustrates the end-to-end workflow for robot simulation and testing, is now available.Foxglove, a member of the NVIDIA Inception program for startups, demonstrated an integration that helps developers visualize and debug simulation data in real time using Foxglove’s custom extension, built on Isaac Sim.New Capabilities for Isaac ROS 3.2NVIDIA Isaac ROS, built on the open-source ROS 2 software framework, is a suite of accelerated computing packages and AI models for robotics development. The upcoming 3.2 release enhances robot perception, manipulation and environment mapping.Key improvements to NVIDIA Isaac Manipulator include new reference workflows that integrate FoundationPose and cuMotion to accelerate development of pick-and-place and object-following pipelines in robotics.Another is to NVIDIA Isaac Perceptor, which features a new visual SLAM reference workflow, enhanced multi-camera detection and 3D reconstruction to improve an autonomous mobile robot’s (AMR) environmental awareness and performance in dynamic settings like warehouses.Partners Adopting NVIDIA Isaac Robotics companies are integrating NVIDIA Isaac accelerated libraries and AI models into their platforms.Universal Robots, a Teradyne Robotics company, launched a new AI Accelerator toolkit to enable the
2025-04-05Products Hardware Gaming and Creating GeForce Graphics Cards Laptops G-SYNC Monitors Studio SHIELD TV RTX AI PCs Laptops and Desktops GeForce RTX in Laptops NVIDIA RTX in Professional Laptops NVIDIA RTX in Desktop NVIDIA Project DlGITS NVIDIA RTX AI Workstations Cloud and Data Center Overview Grace CPU DGX Platform EGX Platform IGX Platform HGX Platform NVIDIA MGX NVIDIA OVX DRIVE Sim Networking Overview DPUs and SuperNICs Ethernet InfiniBand GPUs GeForce NVIDIA RTX / Quadro Data Center Embedded Systems Jetson DRIVE AGX Clara AGX Software Application Frameworks AI Inference - Triton Automotive - DRIVE Cloud-AI Video Streaming - Maxine Computational Lithography - cuLitho Cybersecurity - Morpheus Data Analytics - RAPIDS Decision Optimization - cuOpt Generative AI - NeMo Healthcare - Clara High-Performance Computing Intelligent Video Analytics - Metropolis Metaverse Applications - Omniverse Physical AI - Cosmos Robotics - Isaac Speech AI - Riva Telecommunications - Aerial Apps and Tools Application Catalog NGC Catalog NVIDIA NGC 3D Workflows - Omniverse Data Center GPU Monitoring NVIDIA App for Enterprise NVIDIA RTX Desktop Manager RTX Accelerated Creative Apps Video Conferencing AI Workbench Gaming and Creating GeForce NOW Cloud Gaming GeForce Experience NVIDIA Broadcast App Modding - RTX Remix Studio Infrastructure AI Enterprise Suite Cloud Native Support Cluster Management IO Acceleration Networking Virtual GPU Cloud Services Base Command BioNeMo Cosmos DGX Cloud Edify NeMo Omniverse Private Registry Solutions Artificial Intelligence Overview AI Platform AI Inference AI Workflows Conversational AI Cybersecurity Data Analytics Generative AI Machine Learning Prediction and Forecasting Data Center and Cloud Computing Overview Accelerated Computing for Enterprise IT Cloud Computing Colocation MLOps Networking Sustainable Computing Virtualization Design and Simulation Overview Computer Aided-Engineering Digital Twin Development Rendering and Visualization Robotics Simulation Vehicle Simulation Robotics and Edge Computing Overview Robotics Edge Computing Vision AI High-Performance Computing Overview HPC and AI Scientific Visualization Simulation and Modeling
2025-04-16